|
Close | |
|
Spatial Transformations and Math Representations of Rotations 1. Significance Lack of understanding of rotations and their math representations can lead to serious problems. Example 1. Gimbal lock and Apollo 11 Example 2. Computer graphics / animation problems
Examples of Teaching Materials
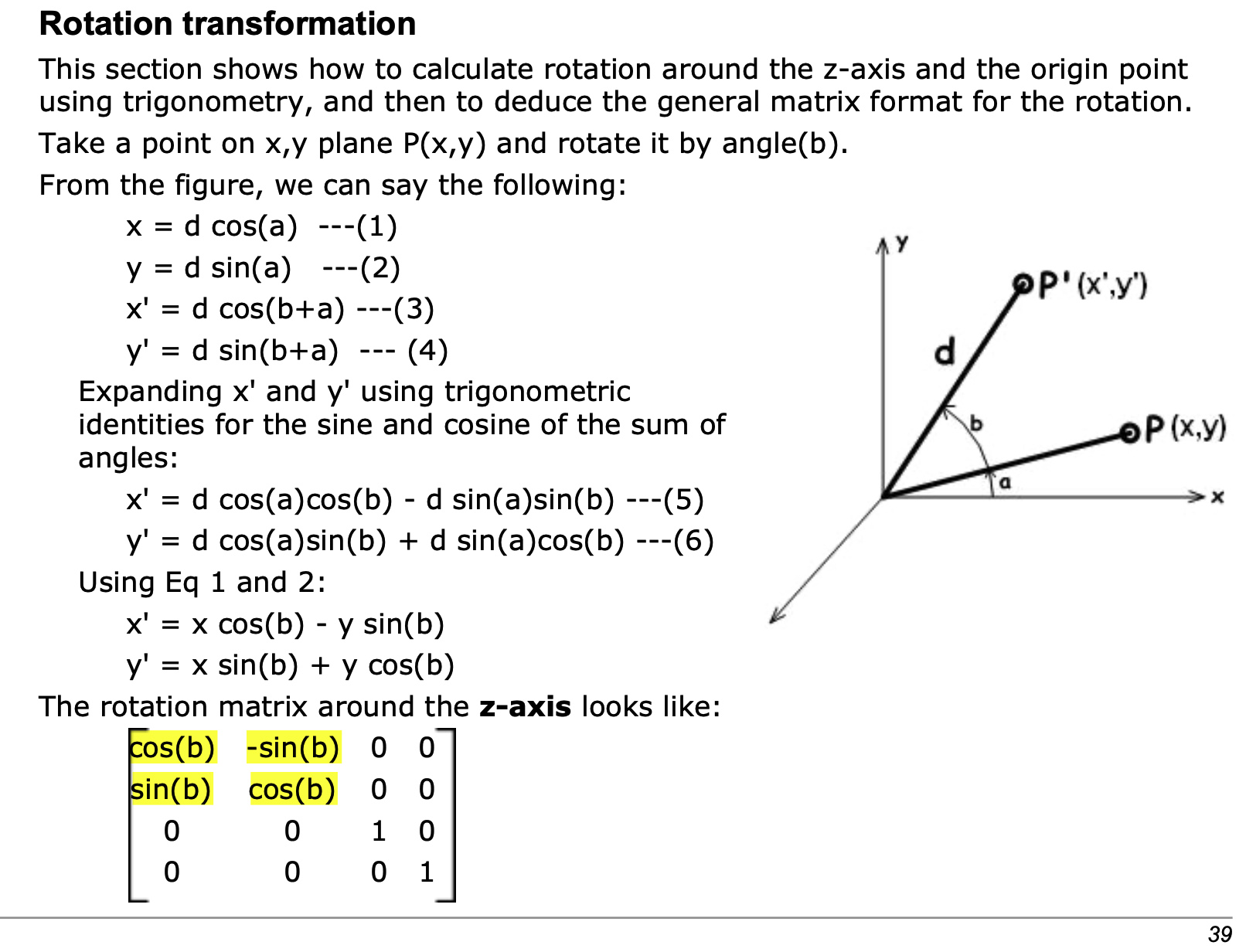
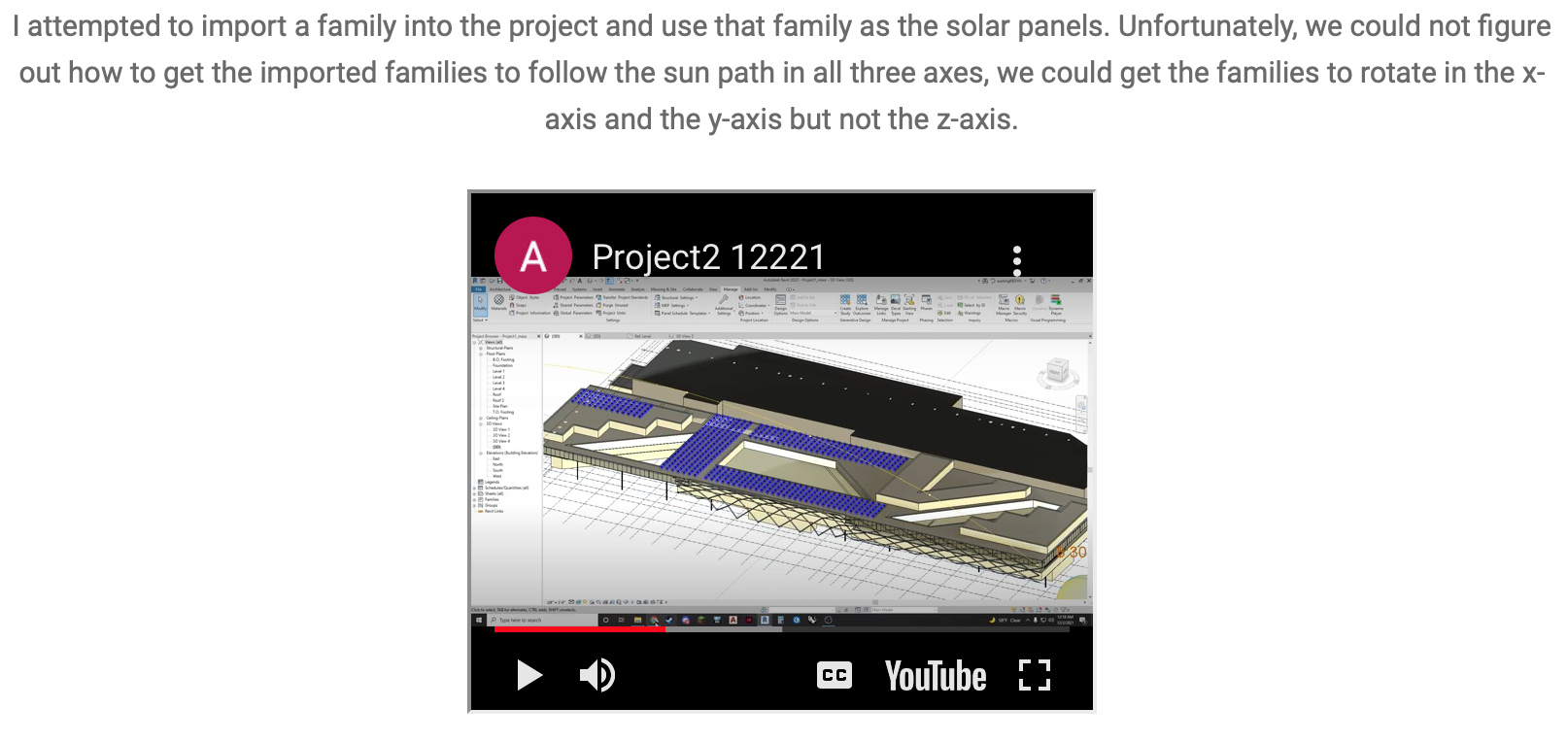
by Rajaa Issa (Essential Mathematics for Computatioal Design) Slides for 2D transformations and matrices in ARCH655, TAMU Challenges of Learning Rotations Example 1: Rotation of solar panels in ARCH653 Building Information Modeling Example 2 - Pilot Studies Review of rotations and their math representations below. 3. Matrices Transformations and Matrices by 3Blue1Brown This video clip ended with a rotation angle of 90 degree, and the corresponding matrix implicitly contains the information of the angle in the matrix elements. Next, we will see how the angles are explicitly expressed in the matrix in the video below to understand better the relationship between rotations and matrices. (Note: Affine transformations include Linear tranformations and Translation) Rotation Matrices by Dr. Jeffrey Chasnov After learning matrices for 2D rotations about a single axis, we now look into matrices for 3D rotations about three axes with their corresponding Euler Angles. 4. Euler Angles Euler Angles and the Euler Rotation Sequence by Dr. Christopher Lum "Augmented Reality" at 1m29s ! Animation in Matlab shows Euler Angles rotation sequence starts at 16:10. Note that Dr. Lum uses the right-hand system, explains the intrinsic rotations (using changed body frame axes) with his aircraft model, does left-multiplication of matrices, and writes the 'transposed' rotation matrices compared to the rotation matrices in https://en.wikipedia.org/wiki/Rotation_matrix -> Basic rotations, which are extrinsic rotations (using fixed world frame axes) with also left-multiplication of matrices. Not sure why he uses the transposed matrices... His animation of the yaw angle = +70 degree at 17m07s seems using the matrix that is not transposed, eventhough the Mathematica coordinate system in the animation is rotated from his North-East-Down coordinate system. Relation of extrinsic and intrinsic rotations 5. Axis-Angle Derivation of Rodrigues' Rotation Formula by Dr. Christopher Lum Using Rodrigues' Rotation Formula to prove Euler's Rotation Theorem by Dr. Christopher Lum (video part 3) 6. Quaternions Visualizing Quaternions (and the Gimbal lock problem showed briefly) by 3Blue1Brown More detailed quaternion calculation by Dr. Christopher Lum Try to watch the complete videos above - they are great learning materials for the topics!
|
||||||||||||||||||||